نسل پنجم راننده هوشمند Waymo
شرکت Waymo در حال ساخت با تجربه ترین راننده هوشمند دنیا می باشد. این راننده هوشمند (Waymo Driver) ترکیبی است از نرمافزارها و سخت افزارهایی که با انجام محاسبات بر روی دادههای دریافتی از انواع سنسورهای نصب شده بر روی اتومبیل، جهت یابی و هدایت وسایل نقلیه را به عهده میگیرد و با داشتن دیدی کامل و آگاهی از جزییات محیط اطرافش میتواند در فرایند رانندگی نسبت به انسان تصمیم گیریهای دقیق و ایمن تری داشته باشد.

از زمانی که این کمپانی به لطف سنسور ها و سخت افزارهای دیگرش، خودرو جکوار تمام برقی خود را ارائه کرد توجه ویژه ای به Waymo driver شده است. این سیستم رانندگی خودکار در مرحله تست و عیب یابی ، ده میلیارد کیلومتر را به صورت شبیه سازی و ۲۰ میلیون کیلومتر را در محیطهای واقعی پیموده است تا بتواند در شرایط پیچیده محیطی به درستی عمل کند .
برای Waymo driver سیستم بینایی گسترده ای طراحی و ساخته شده است که ترکیبی است از انواع ابزار تشخیصی و سنسورهای متفاوت که هریک با دریافت اطلاعات منحصر به فرد از محیط، نقش مکملی در بدست آوردن یک دید کامل نهایی از محیط ایفا میکنند که در ادامه مطالب به نقش هریک اشاره خواهیم کرد.
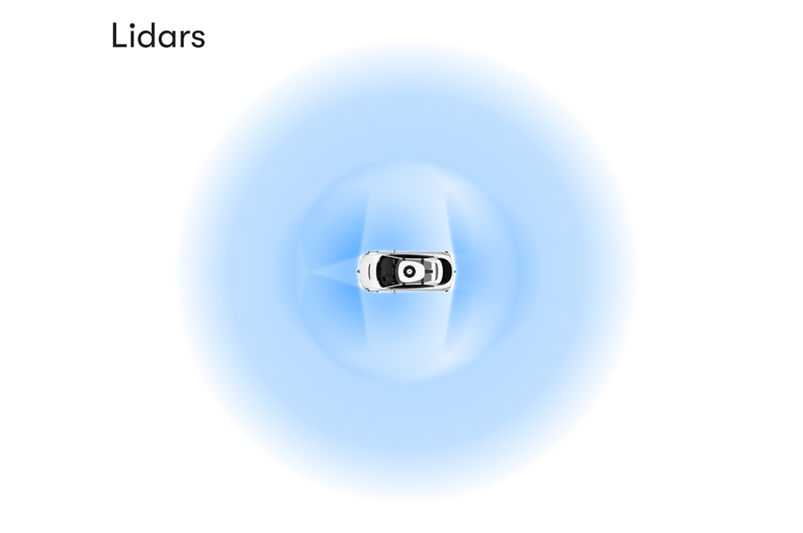
Lidars
لیدار به عنوان یکی از سنسورهای قدرتمند با ارائه تصویر سه بعدی از محیط این امکان را میدهد که تا شعاع ۳۰۰ متری سایز و فاصله اجسام اندازه گیری شود. به همین دلیل از اطلاعات دریافتی از آن برای شناسایی نوع وسایل نقلیه مجاور حتی در زمانی که در راستای تابش خیره کنند نور خورشید یا در تاریکی مطلق شب باشند می توان استفاده کرد.
نسل جدید لیدارهای این شرکت در چهار گوشه خودرو نصب شدهاند تا مانند سیستم بینایی پرندگان، زاویه دید ۳۶۰ درجه را ایجاد کنند و آن راقادر سازد تا برای رانندگی در محیطهای پیچیدهای چون ترافیکهای شهری علاوه بر تشخیص تمام خودروها، دوچرخهها و خطوط عابر ، از جزییات بیشتری مانند باز شدن درب خودرویی که در فاصله صد متری قرار دارد آگاه شود.
Cameras
دوربین های بکار رفته در این ماشین به واسطه استفاده از لنزهای خاص و بهرهگیری از مهندسی اپتو مکانیکی در طراحی آن، تا فاصله ۵۰۰ متری و در هر دمایی جزییات بیشتری از اجسام مجاور بدست میآورند.
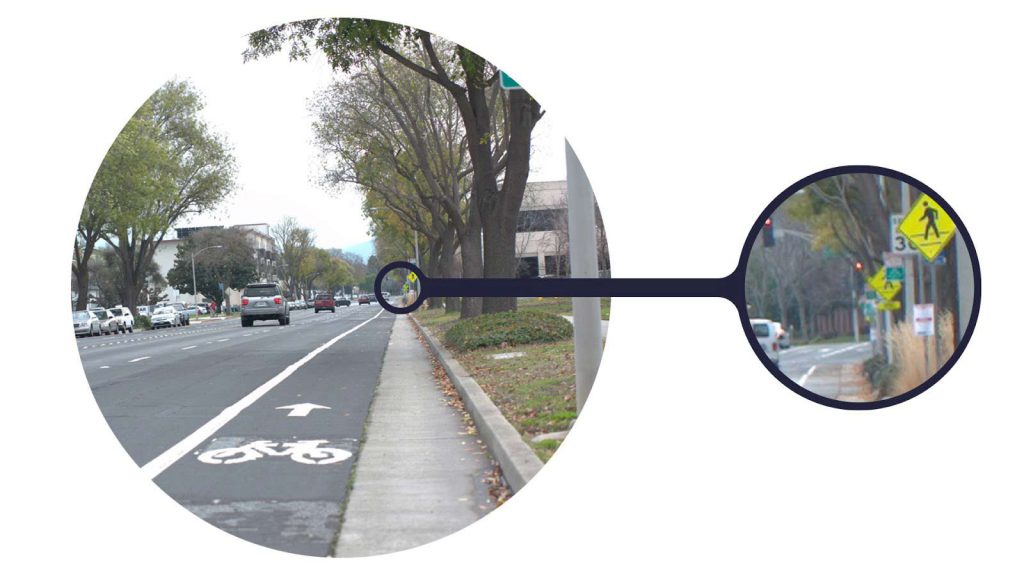
برای مثال زمانی که لیدار ها مانعی را در مقابل خود شناسایی کنند، دوربین های محیطی به واسطه الگوریتم هایی که مبتنی بر یادگیری ماشین (Machine Learning) هستند جزییات بیشتری در باره آن جسم به دست میآورند. همچنین با تلفیق اطلاعات گرفته شده از لیدار ها و دوربین ها میتوان نقاط کوری که توسط ماشین های پارک شده یا وسایل نقلیه بزرگ به وجود می آیند را کاهش داد و حتی زمانی که یک کامیون در جلوی شما حرکت میکند با داشتن دید مناسبی از محیط و جاده موقعیت ایمن و مناسبی برای سبقت گرفتن شناسایی شود و تصمیم گیریها در فرایند رانندگی توسط این ربات سریعتر و با آگاهی بیشتری گرفته شود.
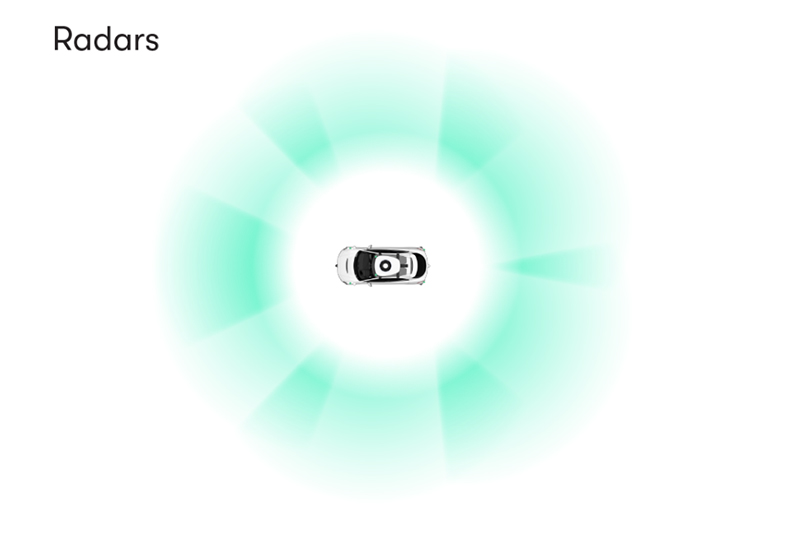
Radars
در حالی که لیدار ها و دوربین ها به ویمو کمک میکنند تا اجسام را تشخیص دهد و بشناسد، رادار عملکرد هر دو آنها با توانایی منحصر به فرد خود در دیدن اجسام و اندازهگیری سرعت آنها حتی در شرایط سخت آب و هوایی نظیر بارندگی و مه تکمیل میکند. نسل بعدی این نوع رادارها میتوانند اجسام را از فواصل دورتر تشخیص دهند و از این روی فرصت بیشتری برای تصمیمگیری برای سیستم هدایت خودرو مهیا نماید.
همانطور که اشاره شد برای تعامل و آگاهی ویمو از محیط اش از سنسور ها و ابزار تشخیصی متفاوتی استفاده شده است و هرکدام از این سنسور ها در هر لحظه حجم بالایی از دادههای مرتبط با محیط را جمع آوری میکنند. از طرفی در فرآیندی مانند رانندگی و به دلیل امنیت و پیچیدگیهای این کار نیاز به سرعت پردازش بالا بر روی این حجم زیاد از دادههای محیط میباشیم که امروزه این کار به لطف سیستم عامل رباتها (ROS) که در حقیقت یک framework یا چارچوب نرمافزار منعطف و متن باز برای برنامه نویسی ربات ها میباشد، انجام پذیر شده است .
منبع: The official Waymo blog
Warning: Undefined variable $pid in /home/pishrobo/mag.pishrobot.com/wp-content/themes/crystalskull/blog-single.php on line 55











