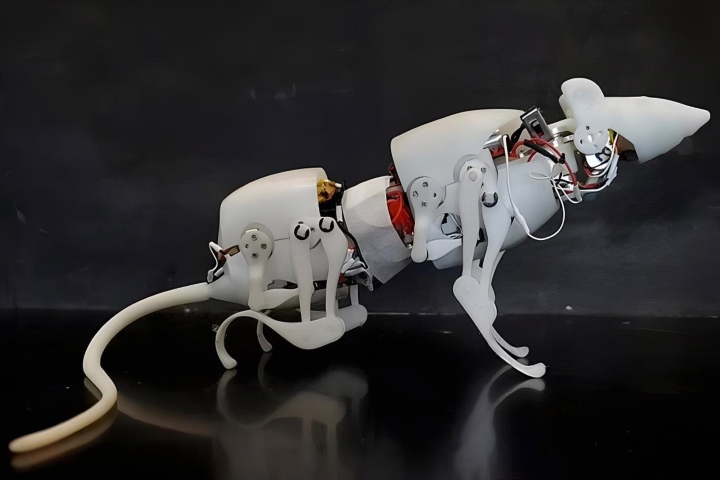
موش رباتی SQuRo

ایدهی ساخت
ساختمانی را در نظر بگیرید که ریزش کرده است و راهی برای ورود به آن وجود ندارد. چگونه میتوان موقعیت را ارزیابی کرد؟ لولهای در زیر زمین در نظر بگیرید که نشتی دارد. چگونه میتوان موقعیت آن را پیدا کرد؟
در موارد گفته شده راهی به مرکز حادثه وجود ندارد. اما اگر رباتی هم اندازه موش وجود داشت که میتوانست از موانع عبور کند و وارد خطوط لوله شود چه؟ شاید نتواند اجسام سنگین را حرکت دهد ولی برای ارزیابی موقعیت بسیار کاربردی میباشد.
چهار نکته جهت شناخت بهتر موش رباتی SQuRo:
استفاده از اشعه ایکس:
تیم طراحی SQuRo، برای اولین بار در دنیا از اشعه ایکس جهت درک بهتر آناتومی موش و شبیهسازی آن استفاده نمودند. آنها SQuRO را طوری طراحی کردند که ساختار، الگوهای حرکتی و درجهی آزادی (DOF) شبیه به جوندگان داشته باشد. برای همین دارای دو مفصل در کمر و گردن است.
بررسی تواناییهای اولیه:
در ابتدا توانایی انجام چهار حرکت کلیدی خم شدن و ایستادن، راه رفتن، چرخش و خزیدن بررسی شد که نتایج، بسیار چشمگیر بود. SQuRo توانست در شعاع گردش بسیار کمی (کمتر از نصف طول بدن خود) بچرخد.
در این باره آقای شی (مدیر تیم طراحی) میگوید: “شعاع گردش این ربات بسیار کمتر از مدلهای مشابه است و چابک بودن در فضاهای باریک و موقعیتهای سخت را تضمین میکند.”
آزمایشهای سخت و چالشهای ابداعی:
در اولین آزمایش، SQuRo باید از یک مسیر باریک و غار مانند عبور میکرد که توانست با موفقیت این مسیر را پیمایش کند. در چالش دیگری، وزنهی 200 گرمی (که معادل 91 درصد وزن SQuRo است) را در میدانی با شیبهای 20 درجه، به طور موفقیت آمیز حمل کرد.
موش رباتی در شرایط سخت:
نکته مهم این است که در مناطق بحرانی، خطوط لوله و یا سایر محیطهای چالشبرانگیز، ربات باید بتواند از موانع پیش رو عبور کند. SQuRo طوری طراحی شده است که بتواند به عقب تکیه داده با حرکت دادن بخش جلویی، خود را در موقعیت مناسب قرار دهد تا از روی مانع عبور کند (مشابه کاری که موشهای واقعی انجام میدهند). در آزمایشها مشخص شد که SQuRo میتواند بر موانعی به ارتفاع 30 میلی متر (که 33 درصد ارتفاع خودش است) با میزان موفقیت 70 درصد غلبه کند. در آزمایش نهایی، SQuRo پس از افتادن به پهلو توانست خود را به موقعیت قبلی بازگرداند.
IEEE Transactions on Robotics مقالهای دربارهی موش رباتی SQuRo منتشر کرد. در این مقاله آمده طراحی SQuRo با الهام از موش واقعی انجام شده است. این ربات توانایی راه رفتن، خزیدن، بالارفتن از اشیاء را با چابکی بینظیری دارد. همچنین، SQuRo میتواند همانند موشها، پس از سقوط، بهبود یابد. (مثل موش واقعی، از سقوطها جان سالم به در میبرد.)

تواناییهای SQuRo
Warning: Undefined variable $pid in /home/pishrobo/mag.pishrobot.com/wp-content/themes/crystalskull/blog-single.php on line 55











