صفحه اصلی » ربات های پیشرفته در مسابقات استیم کاپ ایران 2019
ربات های پیشرفته در مسابقات استیم کاپ ایران 2019
ارتباط رباتهای تخیلی با دنیای واقعی چیست؟
ساخت این رباتها محدود به فیلمهای تخیلی نمیشود، بلکه شاخهای از علم رباتیک وجود دارد که به منظور ساخت رباتهای حیواننما (Animaloid Robots)، به مطالعه نحوه حرکت جانوران میپردازد. در سالهای اخیر از میان انواع رباتهای حیوان نما و جانورنما توجه خاصی به تولید رباتهای چهارپا (با ایده گرفتن از حرکت سگ) شده است و برخی از کمپانیهای مطرح در عرصه رباتیک محصولات حیرت انگیزی در این حوزه ارائه دادهاند. این ربات های “چهار پا” یا “4Legged Robot” با حداقل دو درجه آزادی در هر پا، به دلیل پایین بودن مرکز ثقل و با صرفه نظر از سرعت کمتر، تعادل بهتری نسبت به رباتهای دوپا دارند. معمولا در این ربات ها از سروو موتور با گشتاور بالا استفاده میشود. کاربرد این رباتها ابتدا در حوزه نظامی بود اما با گذشت زمان به حوزههای دیگری مانند امداد و نجات، تحقیقات علمی و غیره وارد شدهاند.
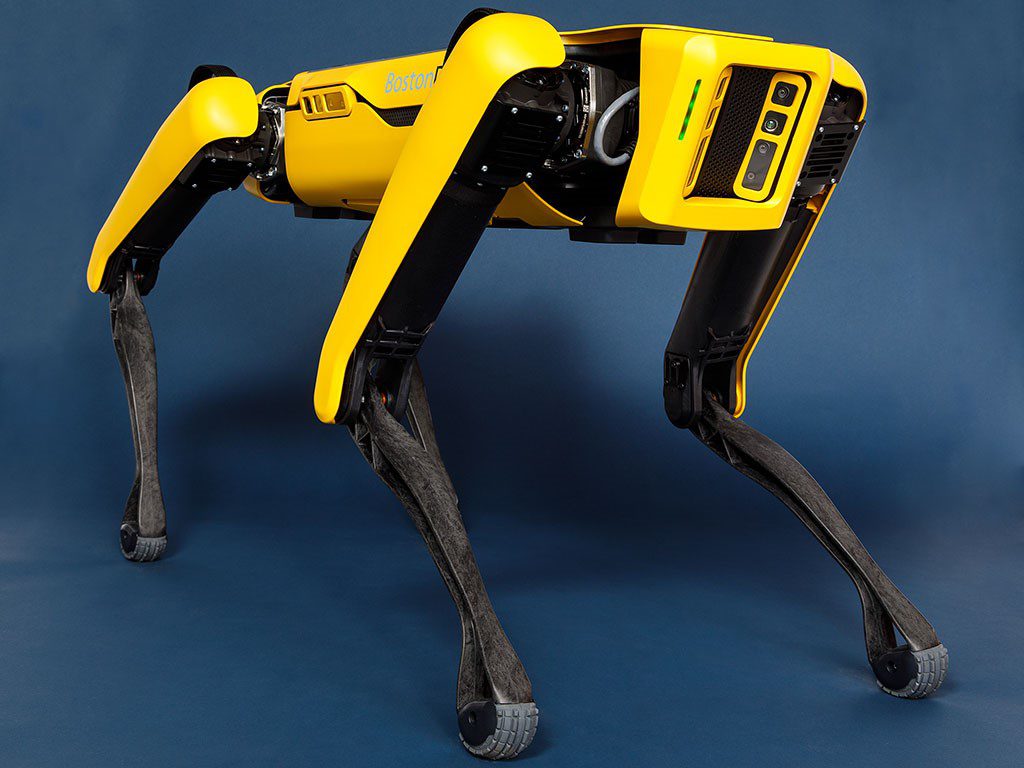
ربات SPOT
رقیب اصلی SPOT
ربات SPOT توسط شرکت Boston Dynamics در سال 2016 معرفی شد. از ویژگیهای این ربات میتوان به دارا بودن 6 درجه آزادی، سرعت حرکت 5.76 کیلومتر بر ساعت، حمل بار تا 14 کیلوگرم، سیستم بینایی 3D با SLAM و جلوگیری از برخورد با مانع و … اشاره کرد.
در رقابت با Spot ربات ANYmal C از شرکت ANYbotics قرار دارد. از جمله ویژگی های این ربات میتوان به وجود 12 درجه آزادی، سرعت حرکت 3.6 کیلومتر بر ساعت، حمل بار تا 10 کیلوگرم، سنسورهای IMU و دوربین استریو برای درک زمین و Lidar برای مسیریابی و … میتوان اشاره کرد.

آیا دانش آموزان پیشروباتی از پس چالش ساخت ربات ۴ پا بر میآیند؟
پاسخ این پرسش را با دیدن فیلم زیر خواهید دید:
برای رباتی که در فیلم بالا مشاهده میکنید علاوه بر ۲ درجه آزادی در هر پا، به منظور حرکت دوربین و فیلم برداری از محیط، ۲ درجه آزادی نیز در محور X و Y در نظر گرفته شده است. موتورهای استفاده شده سرووموتورهایی از نوع داینامیکسل AX-12 و کنترلر آن نیز CM-530 میباشد.
بدنه این ربات در نرمافزار CATIA طراحی و از جنس پلکسی گلس، ساخته شده است. حرکات این ربات توسط برنامه “Roboplus Motion” شبیه سازی و در محیط “Roboplus Task” کدنویسی شده است.
ربات دلتا چیست؟
ربات های دلتا یا عنکبوتی که استفاده آن در صنعت رو به افزایش است به عنوان گونه ای از ربات های موازی شناخته میشوند. این رباتها برای حرکت با سرعت بالا و انجام کارهای تکراری و مداوم طراحی شدهاند. رباتهای دلتا عمدتا در صنعت به عنوان ربات بردار بذار (Pick & Place Robot) در حال جمع آوری محصولات به صورت گروهی یا قرار دادن آنها در یک ظرف با یک الگوی خاص میباشند. فنآوریهای جدید اضافه شده، این رباتها را قادر میسازد تا میان اندازه، رنگ یا شکلهای مختلف تمایز قائل شوند و بر اساس الگوی برنامهریزی شده جسمی را برداشته در جایی دیگر قرار دهند.
ربات موازی و دانش آموزان پیشروباتی
رباتی که در فیلم زیر مشاهده میکنید نوعی از رباتهای موازی میباشد که دارای ۳ درجه آزادی خطی بوده که به دلیل ساختار غیروابستهی زنجیرهای سینماتیکی آن، محبوب میباشد. بدنه آن در نرم افزار SOLIDWORKS طراحی و جنس آن از پلکسی گلس بوده که با دستگاه برش لیزری برش داده شده است.
در ساخت این ربات از برخی قطعات پک KAI-Robot استفاده شده است. کنترلر آن CM-530 و موتورهای آن از نوع سرووموتورهای داینامیکسل AX-12 میباشند.











